
Principal Research Engineer
Huawei Munich Research Center
Email: firstName.lastName (at) live.com
Bio , CV , LinkedIn , Google Scholar
Huawei Munich Research Center
Email: firstName.lastName (at) live.com
Bio , CV , LinkedIn , Google Scholar
Research interests
- Wireless communications
- Vehicular communications (V2X)
- Resource allocation
- Channel modeling
- Reinforcement learning
Current Research Projects
Channel modeling
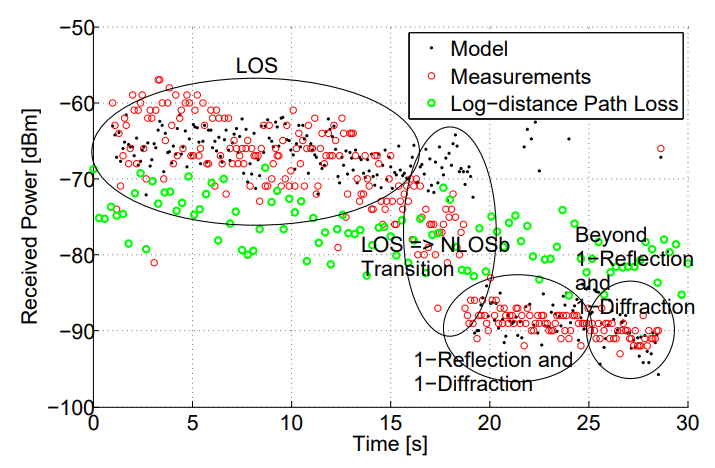
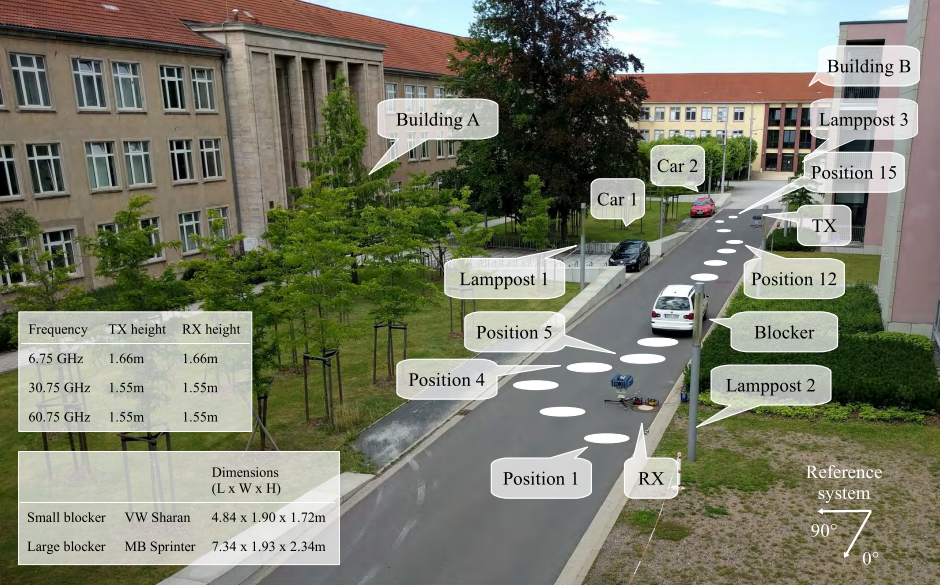
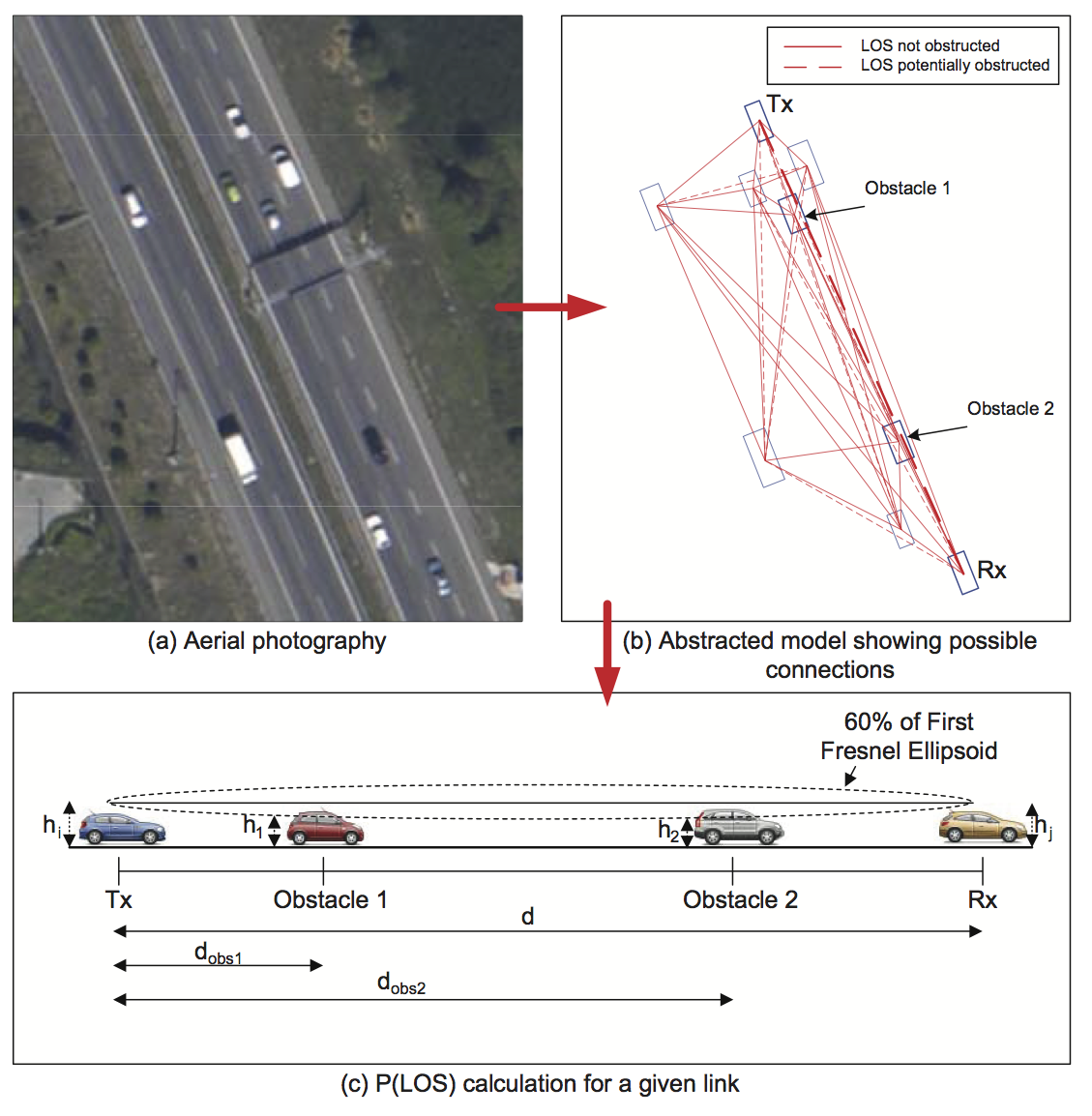
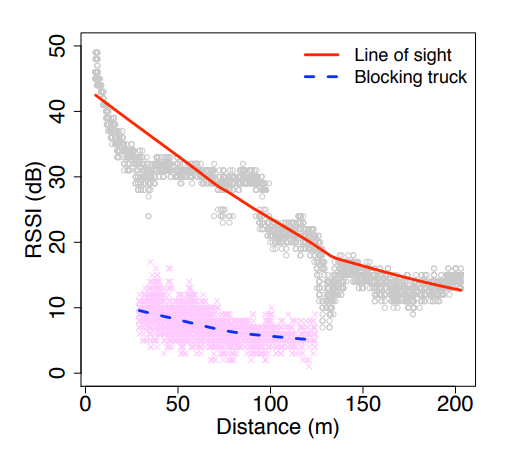
The work on channel modeling is predominantly focused on analysing the peculiarities of V2V channels, in particular how the V2V channel is impacted by the presence of surrounding vehicles. Since measurements showed considerably different channel characteristics in terms of both large and small scale parameters, we classify the V2V links into three types: line of sight (LOS), non-LOS due to vehicles (NLOSv), and non-LOS due to static objects (e.g., buildings, foliage). Over the years, the work on this topic ranged from city-wide characterization of received power through efficient deterministic modeling, to stochastic analysis of state transitions, to path loss, shadow fading, and fast fading characterization of LOS, NLOSv, and NLOS channels for geometry-based stochastic channel modeling.
I am also working on the prediction of channel characteristics through data analysis. In particular, we have looked into whether V2V measurement data containing additional features (e.g., distance, Tx-Rx locations, type of environment, time of day, obstruction type) can be used to estimate the different aspects of radio channels (including path loss, fading, and interference) in a non-parametric fashion.

{kind=link}
Albeit in a simplified form, the following aspects of my work on channel models found its way into 3GPP (TR 37.885) and ETSI (TR 103-257-1) standard:
- Introduction of another LOS state (NLOSv - blockage of LOS by vehicles), along with blockage loss calculations specific for vehicle blockage (based on the work described in IEEE JSAC, IEEE TVT, and IEEE Access)
- Path loss, shadow fading, and fast fading parameterization for LOS and NLOSv channels in highway and urban environments (IEEE Access)
- LOS probabilities and modeling of transitions between LOS, NLOS, and NLOSv states (IEEE VTC Fall '16)
Resource allocation
Resource allocation is a difficult problem even when the network is static and the connections between the scheduler and users are highly reliable. In case of a higly mobile vehicular networks with varying propagation conditions, the problem becomes particularly challenging. Adding to the mix patchy network coverage exacerbates the problem further. State of the art typically employs a combination of heuristics and local sensing to allocate the resources and typically trades off reliability and efficiency to achieve.
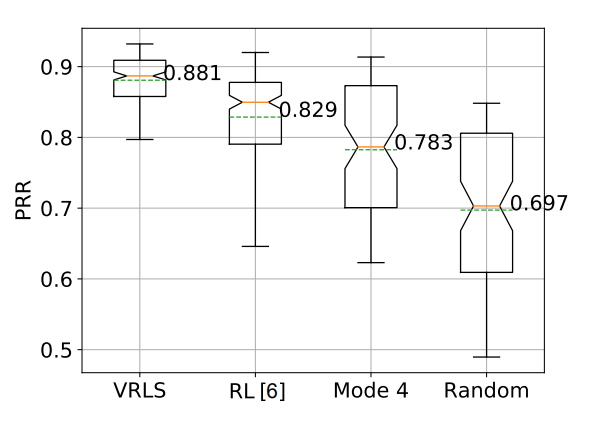
We investigate whether a centralized learning scheduler can be taught to efficiently pre-assign the resources to vehicles for-of-coverage V2V communication. Specifically, we employ a reinforcement learning (RL) scheduler that interacts with the vehicular environment and learns to predict possible resource collisions and half-duplex limitations so that it can efficiently (pre-)allocate the resources to vehicles. Our initial results (described in IEEE VTC Spring '18, IEEE VNC '18, and VTC Fall '19) are encouraging, showing that the employed Vehicular Reinforcement Learning Scheduler (VRLS) can learn efficient strategies for assigning resources, even in case of uncertainty caused by varying radio conditions, vehicular traffic density, and vehicle speeds.

Code
In addition to standardized models, some of the research I worked on found its way into freely available code:-
GEMV^2 V2X propagation simulator (10k+ downloads, used by academia and
automotive OEMs). More information and source code are available at vehicle2x.net. Below are two sample outputs from the GEMV^2 visualization tool.

- GEMV^2 implementation in Artery/OMNeT++ (courtesy of Thiago C. Vieira and Raphael Riebl), available at GitHub
- Implementation of a MAC protocol for Visible Light Communications (courtesy of Boris Tomaš), available at GitHub
- Visualization: i) LOS obstruction analysis; ii) One-hop and Two-hop Tall Vehicle Relaying datasets described in the IEEE TMC paper
Measurement data
- Datasets collected for analysis of V2V LOS channels and described in ACM VANET '13 and CMU T-SET Tech. Rep. papers. Download experimental data (email me for password)

- Datasets collected during our Tall Vehicle Relaying study described in IEEE TMC '14 paper and IEEE VNC '11 paper
Download experimental Data (email me for password): 1-hop, 2-hop
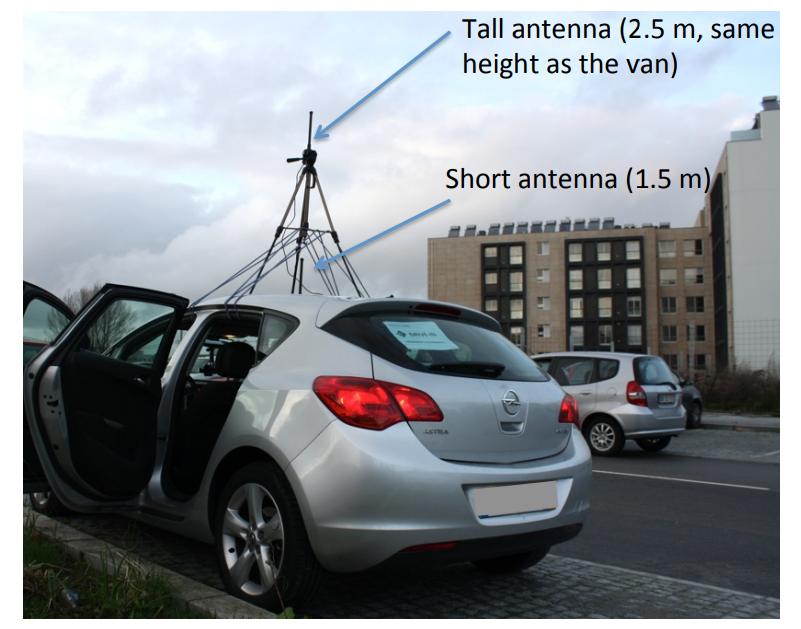
- Measurements collected during the impact of vehicle blockage on V2V channels. Detailed description of the study IEEE JSAC '11 and IEEE VNC '10 Slides
Download experimental Data (email me for password)
- Visualization of measurement data:
- LOS obstruction analysis described in the IEEE VNC '10 paper;
- One-hop and Two-hop Tall Vehicle Relaying datasets are described in the IEEE TMC paper


Students
I have been fortunate to work with some extraordinary students.Current students
- Mengfan Wu (industrial Ph.D. student at Huawei, co-advised with Prof. Falko Dressler).
- Lutfi Samara (industrial Ph.D. student at Huawei, co-advised with Prof. Thomas Kürner).
Past students
Ph.D. students
- Taylan Sahin (industrial Ph.D. student at Huawei, co-advised with Prof. Adam Wolisz). Next position: R&D engineer at Nokia.
- Ramya Panthangi Manjunath (industrial Ph.D. student at Huawei; not a formal mentor, but worked closely with Ramya). Next position: R&D engineer at Huawei.
- Boris Tomaš (co-advised with Prof. Neven Vrcek). Next position: Assistant Professor at the University of Zagreb.
- Bengi Aygun (summer Ph.D. intern). Next position: R&D engineer at Ford Germany.
Undergrad and M.S. students at CMU
Older projects
Some of my older work can be found on this link.